First off, if you do want to compact your light collecting area (i.e., light gathering power) and use only one (slightly curved) regular polygon for your segments for simplicity, there are only 3 regular tiling polygons for 2-dimensional Euclidean space (which is approximated by primaries to some degree): equilateral triangles (which we just call triangles hereafter), squares, and regular hexagons (which we just call hexagons hereafter).
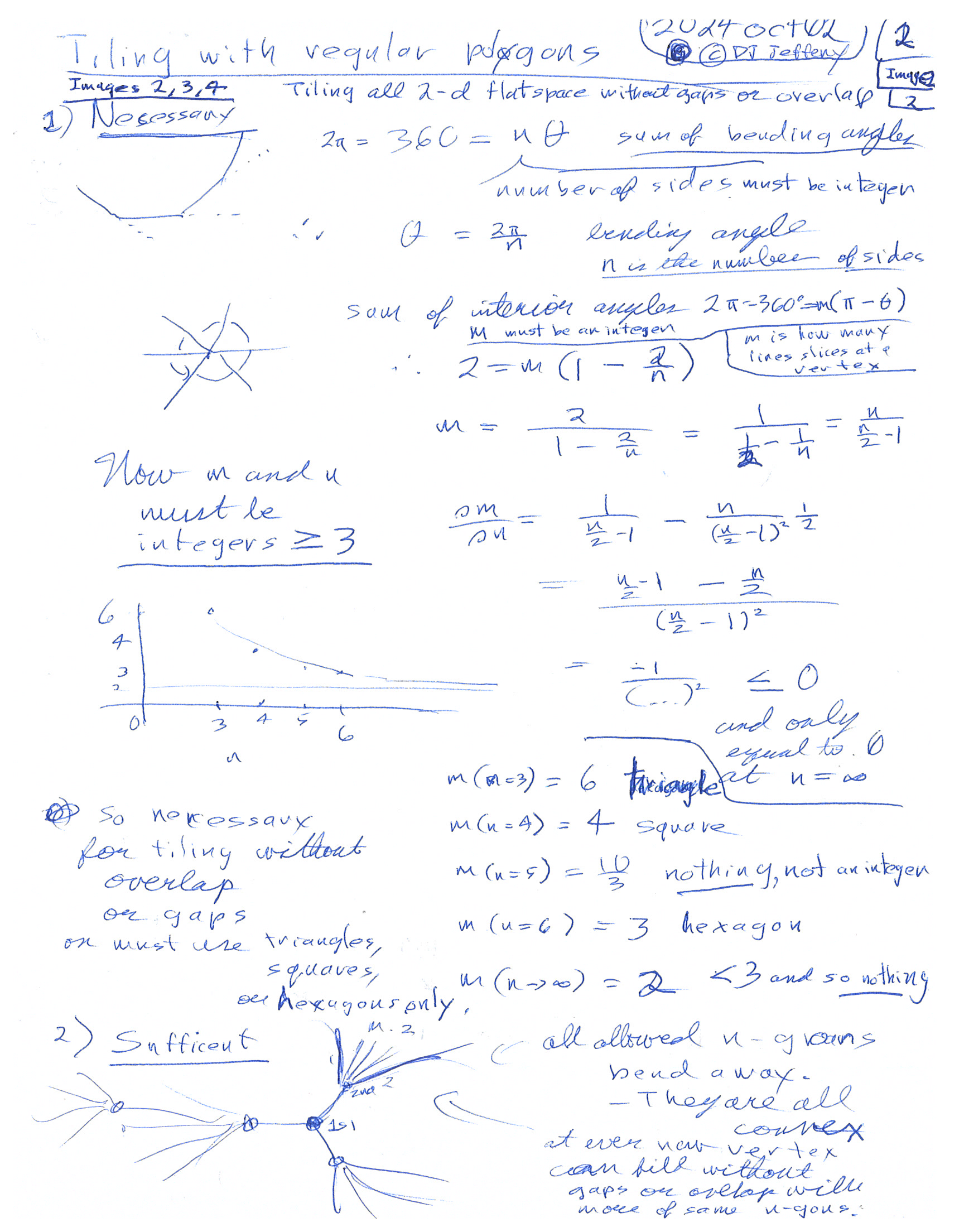
2π = m(π-θ) = m(π-2π/n)
m = 2/(1-2/n) = n/[(n/2)-1]
= 6 for n = 3 which is the smallest allowed n,
= 4 for n = 4,
= 10/3 for n = 5 which is impossible
since m must be an integer,
= 3 for n = 6.
Note the function m(n) is
monotonically decreasing
with n and the only
stationary point is at n=∞,
where m(n=∞)=2.
Well, someone knows, but let's try guessing.
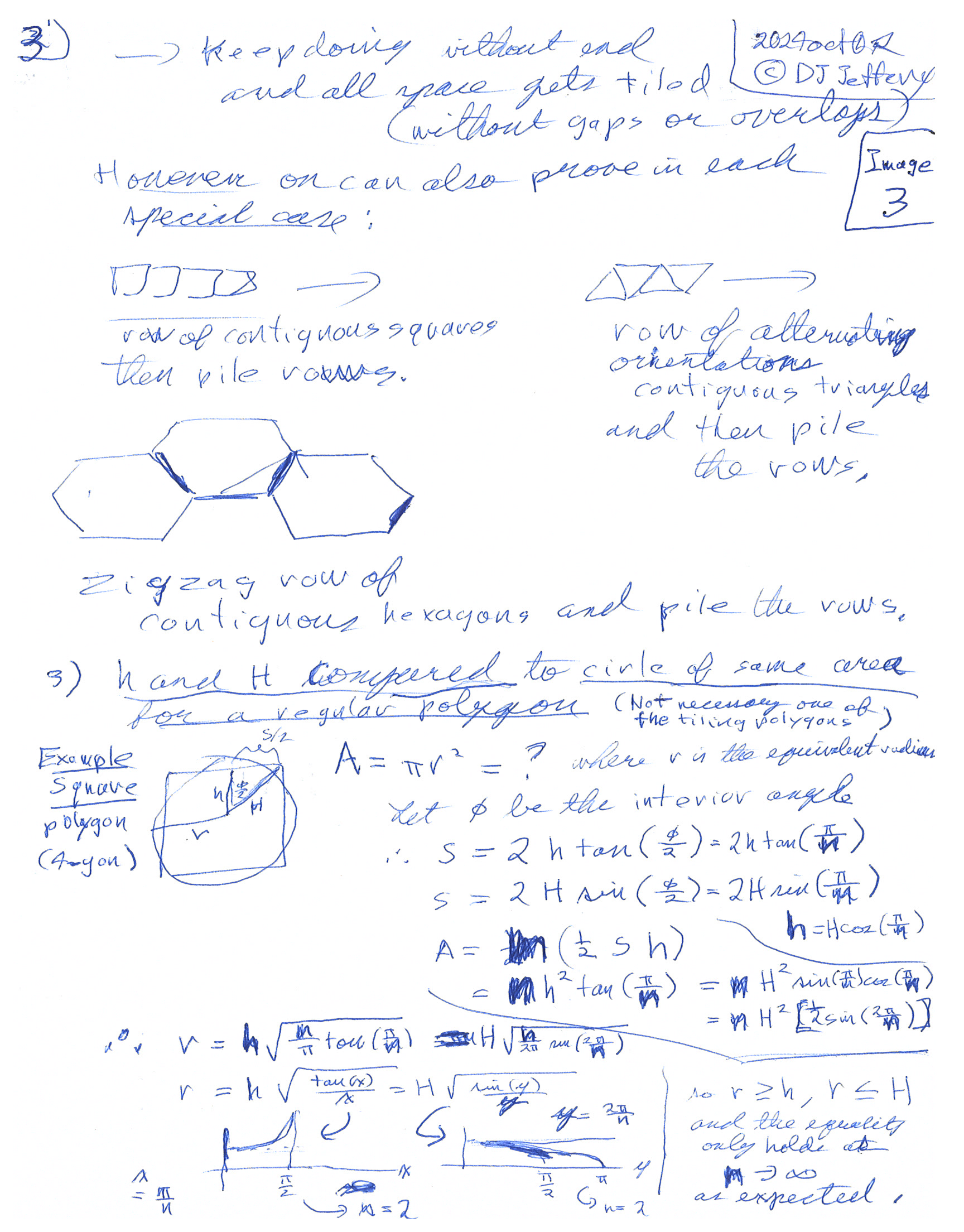
By rounder, we mean that the mininum/maximum distance (which we call h/H) to a side are as large/small as they can be relative to a radius of circle of the same area as the regular tiling polygons. This statement is proven by the formulae for the such a radius: i.e.,
r = h*[(tan(x)/x]**(1/2) = H*[(tan(y)/y]**(1/2) ,where x=π/n and y=2π/n. With some insight from Image 3, it should be clear that as n gets bigger, h/H must get bigger/smaller to maintain the equalities in the formulae. In fact, for n→∞, r = h = H since the polygon has become a circle.
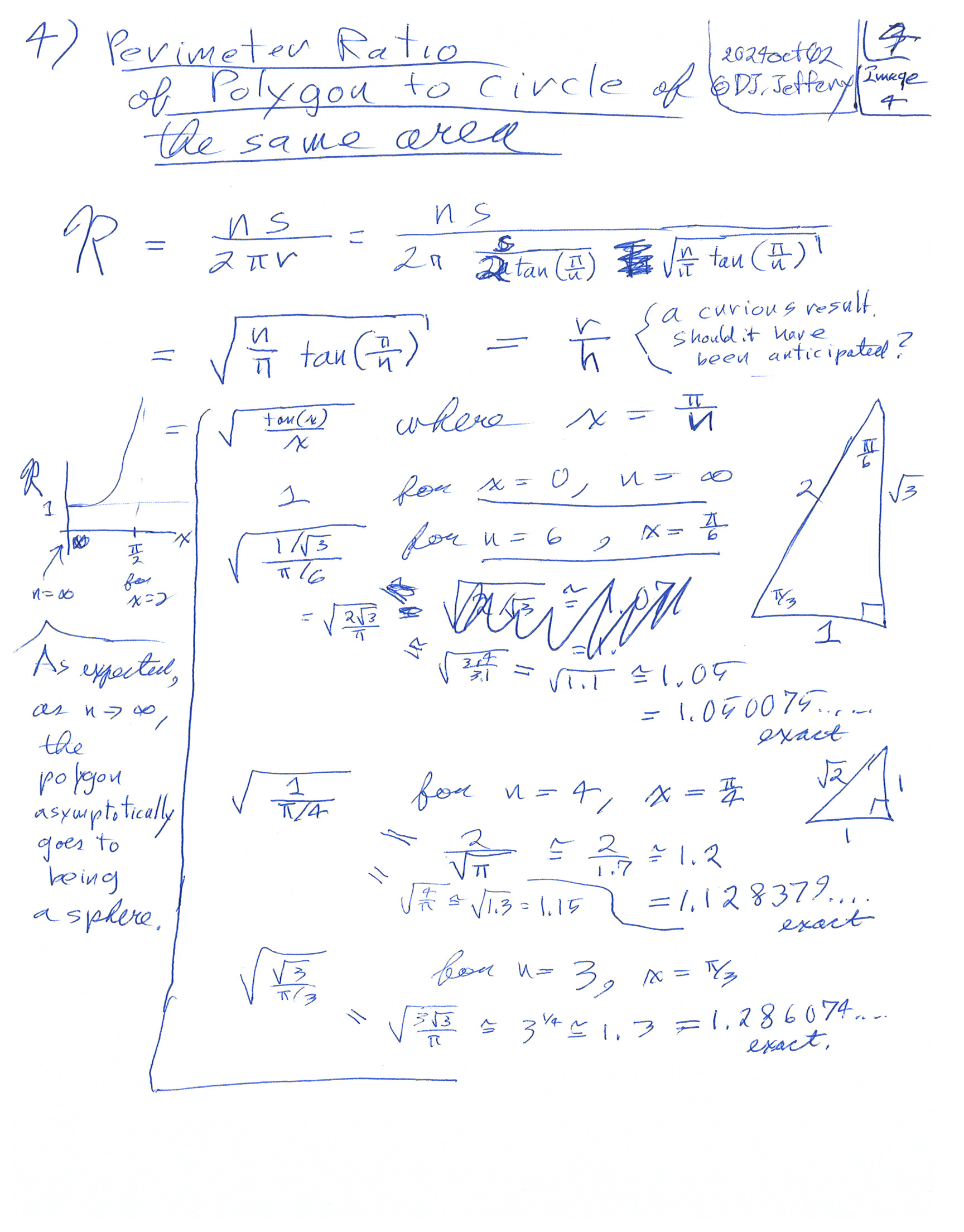
R = [(tan(x)/x]**(1/2) ,where x=π/n. With some insight from Image 4, it should be clear that as n gets bigger, R gets smaller. In fact, for n→∞, R = 1 since the polygon has become a circle.
The upshot is you need less boundary material and/or work on hexagonal segments as compared to triangle and square segments.
The saving-on-perimeter-length theory seems like a very minor saving to me for making segments, and so probably NOT worth consideration for that. However, the saving-on-perimeter-length theory is one of the theories as to why honeycombs are made of hexagonal cells (Wikipedia: Honeycomb: Geometry; Wikipedia: Honeycomb conjecture, but note the theorem cited here does NOT seem to apply to real honeycombs which do NOT have circular holes). The theory is that honey bees evolved to make them aim to make honeycombs with greatest compactness and minimum material (i.e., to make hexagon cells) or their collective process of building honeycombs evolved to force them to make hexagon cells every time.