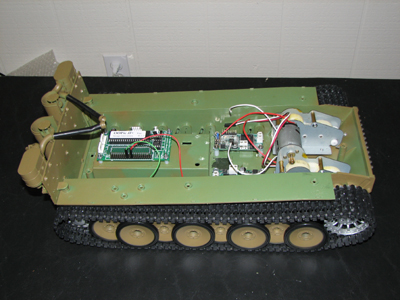
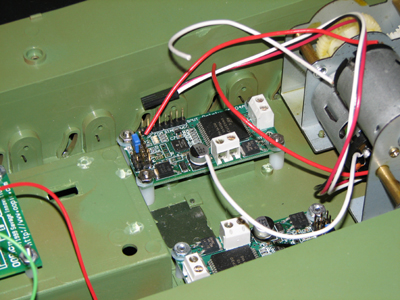
3. After the microprocessor (OOPic-II+
board) and motor drivers (SMC04)
from Pololu
been installed
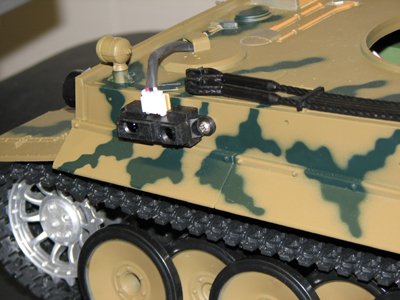
4. The Sharp
IR GP2Y0A21YK distance sensor: so far four IR sensors are mounted
and two front sensors are in use.

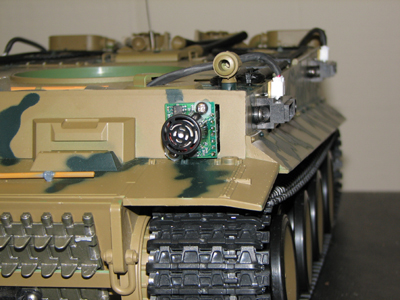
5. The Maxrobotix EZ1
Sonar sensors : Two front (in use) and two on back (not in use) now.

Next Page.
Go Back To Project Page.